7ARN360
Contents (hide)
- 1. Enseignant
- 2. Contact
- 3. Galerie
- 3.1 2015
- 4. Introduction à Wiring
- 5. Inventaire des fonctions
- 6. Allumer et éteindre une DEL
- 7. Contrôler un relais DFRobot
- 8. L'interrupteur
- 9. Contrôler un moteur à courant continu (CC ou DC motor en anglais)
- 10. Capteur de mouvement Parallax «PIR»
- 11. Capteur de lumière «DFRobot Ambient Light Sensor»
- 12. Capteur de distance infrarouge
- 13. Augmenter le nombre de broches 5V et GND
- 14. Tout brancher
- 15. Servomoteur
- 16. Calendrier des prochains jours
- 17. Travail final
1. Enseignant
Thomas Ouellet FREDERICKS
2. Contact
Courriel : thomas-ouellet_fredericks à uqac.ca
3. Galerie
3.1 2015
- http://ferid11.wix.com/bellum
- http://joseesergerie.wix.com/artiste
- http://mthery.wix.com/installation-hybride
- http://www.musigot.wordpress.com
- http://p-al.co/2015/itam2/allj/volet-des-etudes/installations-hybrides/nest-pas-mort-ce-qui-a-jamais-dort-volet-ii/
- http://p-al.co/2015/itam2/trub/lellipse-de-kepler
- http://popsyduck.wordpress.com/
- http://madysonmenier1.wix.com/lecycle
- http://thesighofthejellyfish.wordpress.com/
- http://nsb002.wix.com/teddylife
- http://spamsnackvideo.neocities.org/projet_chimere/chimere.html
4. Introduction à Wiring



5. Inventaire des fonctions
Les blocs :
void setup() { }
// BLOC D'INITIALISATION.
void loop() { }
// BLOC D'EXECUTION EN BOUCLE.
Le mode d'une broche :
pinMode( #broche , OUTPUT); // Configurer la broche en tant que sortie. // c'est a dire qu'elle peut controler le flux de courant. pinMode( #broche , INPUT); // Configurer la broche en tant qu'entree. // C'est a dire qu'elle peut detecter le flux de courant. // C'est le mode par defaut.
Activer le «pullup» d'une broche(ce qui est nécessaire pour certain circuits):
// Activer le pullup de la broche, ce qui est necessaire pour certain circuits. pullup(#broche);
Contrôler la tension du courant d'une broche en mode OUTPUT (sortie) :
// Envoyer 5V a une broche (la broche doit etre en mode OUTPUT) : digitalWrite( #broche , HIGH); // Envoyer 0V a une broche (la broche doit etre en mode OUTPUT) : digitalWrite( #broche , LOW);
Lire l'état d'une broche en mode INPUT (entrée) :
// Lire l'etat d'une broche en mode INPUT : digitalRead( #broche); // Envoyer 0V a une broche (la broche doit etre en mode OUTPUT) : digitalWrite( #broche , LOW);
Contrôler le temps :
// Bloquer le code pendant x millisecondes : delay(x);
6. Allumer et éteindre une DEL
6.1 Allumer et éteindre la DEL de débogage
«debug_led» :
/*
DESCRIPTION
Allumer et eteindre la DEL de debogage
selon un intervalle fixe de 1000 ms.
*/
// DEBUG_LED
// Bloc de code qui permet d'identifier DEBUG_LED,
// i.e. la broche qui correspond a la DEL de debogage.
// Pour Arduino, DEBUG_LED correspond a la broche 13.
// Pour Wiring, DEBUG_LED est identifie par WLED.
#if defined(ARDUINO)
#define DEBUG_LED 13
#else
#define DEBUG_LED WLED
#endif
// BLOC D'INITIALISATION.
void setup() {
// Configurer la broche DEBUG_LED en tant que sortie,
// c'est a dire qu'elle peut controler le flux de courant.
pinMode(DEBUG_LED, OUTPUT);
}
// BLOCK D'EXECUTION.
void loop() {
// Envoyer 5V (ce qui allume la DEL) :
digitalWrite(DEBUG_LED, HIGH);
// Bloquer le code pendant 1 seconde (1000 ms) :
delay(1000);
// Envoyer 0V (ce qui eteint la DEL) :
digitalWrite(DEBUG_LED, LOW);
// Bloquer le code pendant 1 seconde (1000 ms) :
delay(1000);
}


6.2 Allumer et éteindre une DEL branchée à une broche

Nous branchons une DEL et sa résistance à la broche 7. Nous devons remplacer toutes les mentions de «DEBUG_LED» par le numéro de la broche qui est 7.


/*
DESCRIPTION
===========
Allumer et eteindre une DEL branchee
a la broche 7 selon un intervalle fixe de 1000 ms.
CIRCUIT
===========
Broche 7 <-> resistance 150 ohms <-> DEL <-> GND
*/
// BLOC D'INITIALISATION.
void setup() {
// Configurer la broche 7 en tant que sortie,
// c'est a dire qu'elle peut controler le flux de courant.
pinMode(7, OUTPUT);
}
// BLOCK D'EXECUTION.
void loop() {
// Envoyer 5V (ce qui allume la DEL) :
digitalWrite(7, HIGH);
// Bloquer le code pendant 1 seconde (1000 ms) :
delay(1000);
// Envoyer 0V (ce qui eteint la DEL) :
digitalWrite(7, LOW);
// Bloquer le code pendant 1 seconde (1000 ms) :
delay(1000);
}
6.3 Exercice : SOS en code morse lumineux

7. Contrôler un relais DFRobot

7.1 Fonctions
- La broche qui contrôle le relais doit être en mode OUTPUT : pinMode(#broche,OUTPUT)
- Le relais peut être activé et désactivé avec la fonction digitalWrite(#broche,HIGH) ou digitalWrite(#broche,LOW)
7.2 Activer et désactiver le relais a chaque seconde
/*
DESCRIPTION
===========
Allumer et eteindre un relais DFRobot qui est branche
a la broche 8 selon un intervalle fixe de 1000 ms.
CIRCUIT
===========
Broche 8 <-> D de DFRobot Relay
Broche GND <-> GND du DFRobot Relay
Broche 5V <-> VCC du DFRobot Relay
*/
// BLOC D'INITIALISATION.
void setup() {
// Configurer la broche 8 en tant que sortie,
// c'est a dire qu'elle peut controler le flux de courant.
pinMode(8, OUTPUT);
}
// BLOCK D'EXECUTION.
void loop() {
// Envoyer 5V (ce qui active le relais) :
digitalWrite(8, HIGH);
// Bloquer le code pendant 1 seconde (1000 ms) :
delay(1000);
// Envoyer 0V (ce qui desactive la DEL) :
digitalWrite(8, LOW);
// Bloquer le code pendant 1 seconde (1000 ms) :
delay(1000);
}

8. L'interrupteur

8.1 Fonctions
- La broche qui effectuera l'interruption doit être en mode INPUT : pinMode(#broche,INPUT)
- Le mode pullup de la broche doit être activé : pullup(#broche)
- L’état de la broche (LOW/HIGH) peut être lu avec la commande digitalRead(#broche)
8.2 Allumer et éteindre la DEL de débogage selon l'état de l'interrupteur
/*
DESCRIPTION
===========
Allumer et eteindre la DEL de debogage
selon l'etat d'un interrupteur
CIRCUIT
=======
Broche 9 <-> fil dénudé
GND <-> fil dénudé
*/
// DEBUG_LED
// Bloc de code qui permet d'identifier DEBUG_LED,
// i.e. la broche qui correspond a la DEL de debogage.
// Pour Arduino, DEBUG_LED correspond a la broche 13.
// Pour Wiring, DEBUG_LED est identifie par WLED.
#if defined(WIRING)
int DEBUG_LED = WLED;
#else
int DEBUG_LED = 13;
#endif
// BLOC D'INITIALISATION.
void setup() {
// Configurer la broche DEBUG_LED en tant que sortie,
// c'est a dire qu'elle peut controler le flux de courant.
pinMode(DEBUG_LED, OUTPUT);
// Configurer la broche 9 en tant qu'entree.
// C'est a dire qu'elle peut detecter le flux de courant.
pinMode(9, INPUT);
// Activer le pullup de la broche 9,
// ce qui est necessaire pour l'interrupteur
pullup(9);
}
// BLOCK D'EXECUTION.
void loop() {
// Le "if ... else if" suivant effectue cette operation :
// Si la lecture de la broche 9 est LOW, allumer la DEL.
// Sinon, si la lecture de la broche 9 est HIGH, eteindre la DEL.
if ( digitalRead(9) == LOW ) { // Si la lecture de la broche 9 est LOW
digitalWrite(DEBUG_LED,HIGH) ; // allumer la DEL.
} else if ( digitalRead(9) == HIGH ) { // Sinon, si la lecture de la broche 9 est HIGH
digitalWrite(DEBUG_LED,LOW) ; // eteindre la DEL.
}
}

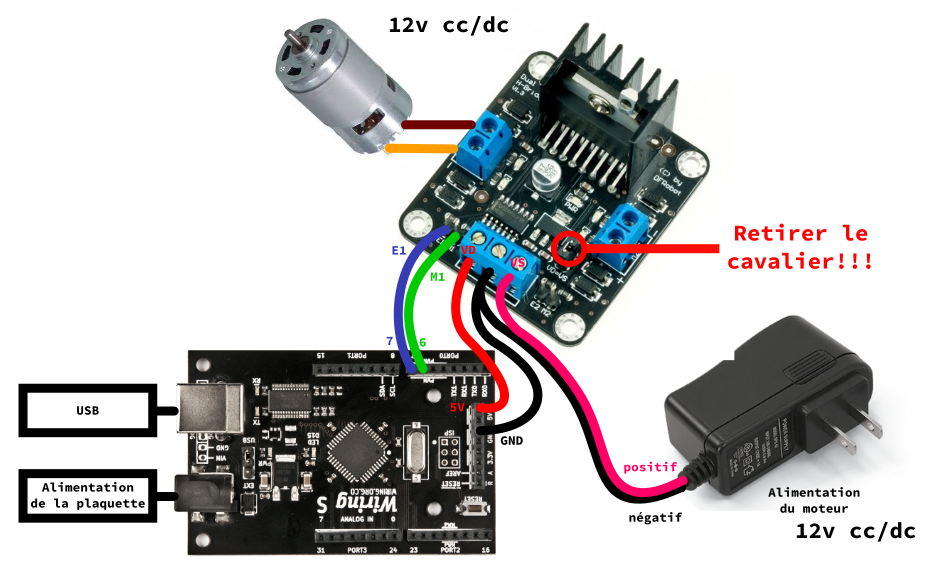
9. Contrôler un moteur à courant continu (CC ou DC motor en anglais)
9.1 Fonctions
- Les broches E1 et M1 doivent être en mode OUTPUT : pinMode(#broche,OUTPUT)
- L’état des broches E1 et M1 peut être contrôlé avec les fonctions digitalWrite(#broche,HIGH) et digitalWrite(#broche,LOW)

9.2 Activer le moteur dans une direction, ensuite dans l'autre et ensuite le désactiver
/*
DESCRIPTION
===========
Controler un moteur branche a un
DFRobot Dual H-Bridge.
CIRCUIT
===========
Broche 7 <-> E1 du DFRobot Dual H-Bridge
Broche 6 <-> M1 du DFRobot Dual H-Bridge
Broche GND <-> GND du DFRobot Relay
Broche 5V <-> VD du DFRobot Relay
Brancher un moteur aux bornes M1+ et M1- du DFRobot Dual H-Bridge
Alimenter le DFRobot Dual H-Bridge avec une alimentation appropriee
*/
// BLOC D'INITIALISATION.
void setup() {
// Configurer les broche 7 et 8 en tant que sorties,
// pour pouvoir y controler le flux de courant.
pinMode(7, OUTPUT);
pinMode(6, OUTPUT);
}
// BLOCK D'EXECUTION.
void loop() {
// Envoyer 5V a la broche 7 (E1) pour activer le moteur.
// Envoyer 5V a la broche 6 (M1) pour que le moteur tourne dans une direction.
digitalWrite(7, HIGH);
digitalWrite(6, HIGH);
// Bloquer le code pendant 1 seconde (1000 ms) :
delay(1000);
// Envoyer 5V a la broche 7 (E1) pour activer le moteur.
// Envoyer 0V a la broche 6 (M1) pour que le moteur tourne dans l'autre direction.
digitalWrite(7, HIGH);
digitalWrite(6, LOW);
// Bloquer le code pendant 1 seconde (1000 ms) :
delay(1000);
// Envoyer 0V a la broche 7 (E1) pour desactiver le moteur.
digitalWrite(7, LOW);
// Bloquer le code pendant 1 seconde (1000 ms) :
delay(1000);
}
9.3 Exercice : allumer ou éteindre un moteur avec un interrupteur
// BLOC D'INITIALISATION.
void setup() {
// CONFIGURER L'INTERRUPTEUR
// Configurer la broche 9 en tant qu'entree.
// C'est a dire qu'elle peut detecter le flux de courant.
pinMode(9, INPUT);
// Activer le pullup de la broche 9,
// ce qui est necessaire pour l'interrupteur
pullup(9);
// CONFIGURER LE MOTEUR
// Configurer les broche 6 et 7 en tant que sorties,
// pour pouvoir y controler le flux de courant.
pinMode(7, OUTPUT);
pinMode(6, OUTPUT);
}
// BLOCK D'EXECUTION.
void loop() {
// Le "if ... else if" suivant effectue cette operation :
// Si la lecture de la broche 9 est LOW, faire tourner le moteur dans un sens.
// Sinon, si la lecture de la broche 9 est HIGH, faire tourner le moteur dans l'autre sens.
if ( digitalRead(9) == LOW ) { // Si la lecture de la broche 9 est LOW
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
} else if ( digitalRead(9) == HIGH ) { // Sinon, si la lecture de la broche 9 est HIGH
digitalWrite(6, HIGH);
digitalWrite(7, LOW);
}
}
10. Capteur de mouvement Parallax «PIR»


Extrait pour effectuer l'initialisation :
// Configurer la broche BROCHE_PIR en tant qu'entree. // C'est a dire qu'elle peut detecter le flux de courant. pinMode(BROCHE_PIR,INPUT);
Extrait pour effectuer une lecture :
// Lire l'etat d'une broche en mode INPUT : int lecturePIR = digitalRead(BROCHE_PIR);
Exemple ; la DEBUG_LED s'allume si du mouvement est détecté par le PIR :
int BROCHE_PIR = 10;
int DEBUG_LED = 15;
void setup() {
// Configurer la broche BROCHE_PIR en tant qu'entree.
// C'est a dire qu'elle peut detecter le flux de courant.
pinMode(BROCHE_PIR,INPUT);
// Configurer la broche DEBUG_LED en tant que sortie,
// c'est a dire qu'elle peut controler le flux de courant.
pinMode(DEBUG_LED, OUTPUT);
}
void loop() {
// Lire l'etat d'une broche en mode INPUT :
int lecturePIR = digitalRead(BROCHE_PIR);
// Le "if ... else if" suivant effectue cette operation :
// Si lecturePIR est LOW, allumer la DEL.
// Sinon, si lecturePIR est HIGH, eteindre la DEL.
if ( lecturePIR == LOW ) { // Si lecturePIR est LOW
digitalWrite(DEBUG_LED,HIGH) ; // allumer la DEL.
} else if ( lecturePIR == HIGH ) { // Sinon, si lecturePIR est HIGH
digitalWrite(DEBUG_LED,LOW) ; // eteindre la DEL.
}
}
11. Capteur de lumière «DFRobot Ambient Light Sensor»


Le capteur de lumière est branché du côté de l'analogique et ne requiert aucune initialisation autre.
Extrait pour effectuer une lecture :
// Effectuer une lecture analogique d'une broche analogique : int lectureLumiere = analogRead(BROCHE_LUMIERE);
À noter que la lecture du capteur de lumière rapporte une valeur entre 0 (noir total), 100 (lumière ambiante UQAC) et 1000 (lumière forte).
Exemple ; la DEBUG_LED s'allume la lecture de lumière dépasse 100 :
int BROCHE_LUMIERE = 0;
int DEBUG_LED = 15;
void setup() {
// Configurer la broche DEBUG_LED en tant que sortie,
// c'est a dire qu'elle peut controler le flux de courant.
pinMode(DEBUG_LED, OUTPUT);
}
void loop() {
// Effectuer une lecture analogique d'une broche analogique :
int lectureLumiere = analogRead(BROCHE_LUMIERE);
// Le "if ... else if" suivant effectue cette operation :
// Si lectureLumiere est plus grand que 100, allumer la DEL.
// Sinon, si lectureLumiere est plus petit ou egal a 100, eteindre la DEL.
if ( lectureLumiere > 100 ) { // Si lectureLumiere est plus grand que 100
digitalWrite(DEBUG_LED,HIGH) ; // allumer la DEL.
} else if ( lectureLumiere <= 100 ) { // Sinon, si lectureLumiere est plus petit ou egal a 100
digitalWrite(DEBUG_LED,LOW) ; // eteindre la DEL.
}
}
12. Capteur de distance infrarouge

Le capteur de distance est branché du côté de l'analogique et ne requiert aucune initialisation autre.
Extrait pour effectuer une lecture :
// Effectuer une lecture analogique d'une broche analogique : int lectureLumiere = analogRead(BROCHE_DISTANCE);
À noter que la lecture du capteur de distance rapporte une valeur entre 50 (loin) et 520 (proche).
Exemple ; la DEBUG_LED s'allume la lecture de distance dépasse 256 :
int BROCHE_DISTANCE = 1;
int DEBUG_LED = 15;
void setup() {
// Configurer la broche DEBUG_LED en tant que sortie,
// c'est a dire qu'elle peut controler le flux de courant.
pinMode(DEBUG_LED, OUTPUT);
}
void loop() {
// Effectuer une lecture analogique d'une broche analogique :
int lectureDistance = analogRead(BROCHE_DISTANCE);
// Le "if ... else if" suivant effectue cette operation :
// Si lectureDistance est plus grand que 256, allumer la DEL.
// Sinon, si lectureDistance est plus petit ou egal a 256, eteindre la DEL.
if ( lectureDistance > 256 ) { // Si lectureDistance est plus grand que 256
digitalWrite(DEBUG_LED,HIGH) ; // allumer la DEL.
} else if ( lectureDistance <= 256 ) { // Sinon, si lectureDistance est plus petit ou egal a 256
digitalWrite(DEBUG_LED,LOW) ; // eteindre la DEL.
}
}
13. Augmenter le nombre de broches 5V et GND

14. Tout brancher

15. Servomoteur

Importation de la logithèque (à faire une seule fois dans le code) :
#include <Servo.h>
Variables globales :
Servo servo1; // Une instance du servomoteur
Setup :
servo1.attach(BROCHE_SERVO); // Lier l'instance a une broche
Loop :
servo1.write(90); // Determiner l'angle du moteur
Exemple ; le moteur alterne entre trois angles à chaque seconde:
#include "Servo.h"
Servo servo1; // Une instance du servomoteur
void setup() {
servo1.attach(11); // Lier l'instance a une broche;
}
void loop() {
// Determiner l'angle du moteur a 90 degres
myservo.write(90);
delay(1000);
// Determiner l'angle du moteur a 120 degres
myservo.write(120);
delay(1000);
// Determiner l'angle du moteur a 30 degres
myservo.write(30);
}
16. Calendrier des prochains jours
9 avril : démonstration au laboratoire mac des capteurs suivi d'un temps de test et de discussion au SCAN à partir de 14h15 jusqu'à 16h- 16 avril : temps de montage au SCAN de 10h jusqu'à 16h
- 23 avril : présentations finales au SCAN de 10h jusqu'à 16h
17. Travail final
Réaliser une page Web qui contient les éléments suivants :
- une description du projet d'au moins 500 mots et d'au plus 1000 mots
- une photo bien éclairée du projet
- une courte vidéo qui démontre son fonctionnement
- un schéma ou un dessin de son circuit
- date limite absolue de remise : 1 mai 2015
- pour la remise, envoyer un courriel à thomas-ouellet_fredericks à uqac.ca en indiquant clairement le nom des auteurs et l'adresse de la page Web
Voici quelques exemples tirés d'un autre cours : http://wiki.t-o-f.info/EDM4640/Projets