Arduino > DFRobot Dual H-Bridge

Contents (hide)
1. Introduction

2. Description des broches
TRÈS IMPORTANT: retirer le cavalier «VD=VS»
Commun :
| VD | ➡ | Alimentation 5V du circuit logique |
| GND | ➡ | Alimentation GND du circuit logique et du moteur |
| VS | ➡ | Alimentation positive du moteur |
Moteur 1 (M1+ et M1-) :
| E1 | ➡ | Vitesse de M1+ et M1- |
| M1 | ➡ | Contrôle de direction de M1+ et M1- |
Moteur 2 (M2+ et M2-) :
| E2 | ➡ | Vitesse de M2+ et M2- |
| M2 | ➡ | Contrôle de direction de M2+ et M2- |
3. Contrôle de moteur CC
3.1 Branchement
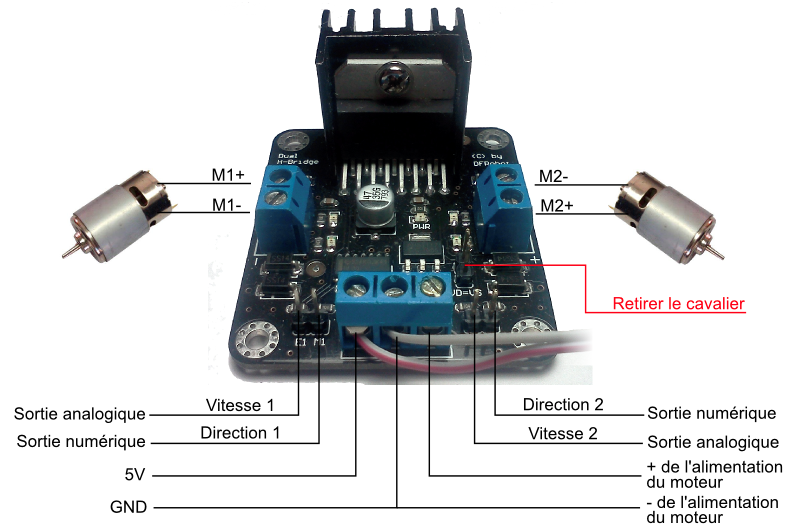
Branchement de deux moteurs CC
3.2 Logique
Tableau de logique du moteur 1:
| E1 | M1 | Résultat |
|---|---|---|
| LOW | ? | Circuit est désactivé |
| HIGH | LOW | Moteur tourne dans un sens à sa vitesse maximale |
| HIGH | HIGH | Moteur tourne dans l'autre sens à sa vitesse maximale |
| PWM | LOW | Moteur tourne dans un sens à la vitesse déterminée par le PWM |
| PWM | HIGH | Moteur tourne dans l'autre sens à la vitesse déterminée par le PWM |
Tableau de logique du moteur 2:
| E2 | M2 | Résultat |
|---|---|---|
| LOW | ? | Circuit est désactivé |
| HIGH | LOW | Moteur tourne dans un sens à sa vitesse maximale |
| HIGH | HIGH | Moteur tourne dans l'autre sens à sa vitesse maximale |
| PWM | LOW | Moteur tourne dans un sens à la vitesse déterminée par le PWM |
| PWM | HIGH | Moteur tourne dans l'autre sens à la vitesse déterminée par le PWM |
3.3 Exemple
/*
L'exemple suivant permet de contrôler un moteur CC
branché au circuit 1 du DFRobot Dual H-Bridge.
MOTEUR <-> DFROBOT DUAL H-BRIDGE:
Un des fils <-> M1+
L'autre fil <-> M1-
PLAQUETTE <-> DFROBOT DUAL H-BRIDGE:
Sortie numérique 4 <-> M1
Sortie analogique 5 <-> E1
5V <-> VD
GND <-> GND
ALIMENTATION DU MOTEUR <-> DFROBOT DUAL H-BRIDGE:
+ <-> GND
- <-> VS
*/
// Sortie analogique
#define BROCHE_VITESSE 5
// Sortie numérique
#define BROCHE_DIRECTION 4
int vitesse;
int direction;
void setup() {
pinMode(BROCHE_DIRECTION,OUTPUT);
// Changer à LOW pour changer
// de direction:
direction = HIGH;
// Choisir un nombre entre 0 et
// 255 pour déterminer la vitesse:
vitesse = 125; // 0-255
}
void loop () {
analogWrite(BROCHE_VITESSE,vitesse);
digitalWrite(BROCHE_DIRECTION,direction);
}
4. Contrôle de moteur à pas
4.1 Moteur à pas unipolaire

Branchement
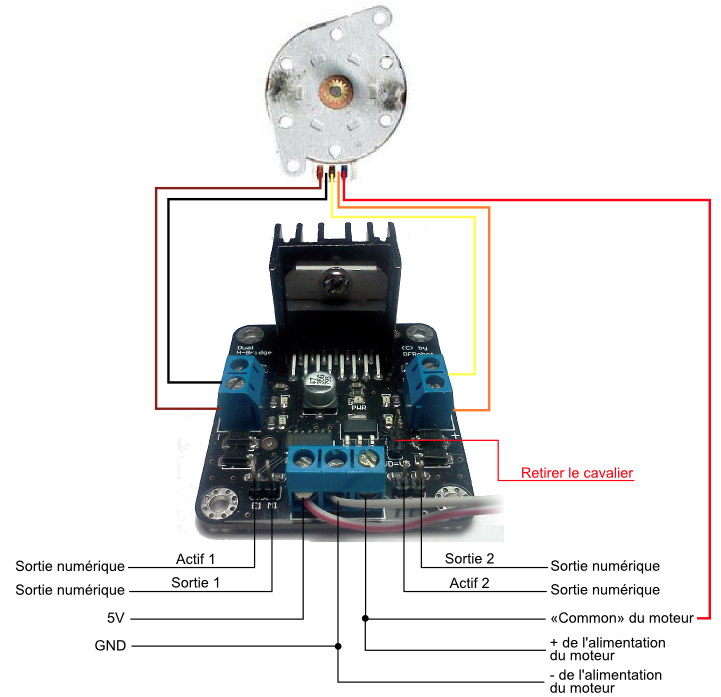
Branchement d'un moteur à pas unipolaire
| VS | ➡ | Fil rouge et + de l'alimentation du moteur |
| M1+ | ➡ | Fil noir |
| M1- | ➡ | Fil brun |
| M2+ | ➡ | Fil orange |
| M2- | ➡ | Fil jaune |
Logique

| Fil noir | ➡ | 1 |
| Fil orange | ➡ | 2 |
| Fil brun | ➡ | 3 |
| Fil jaune | ➡ | 4 |
| Fil rouge | ➡ | «common» |
4.2 Exemple
#include <Stepper.h>
#define STEPS_PER_REVOLUTION 48
#define BROCHE_ACTIF_1 12
#define BROCHE_SORTIE_1 11
#define BROCHE_ACTIF_2 10
#define BROCHE_SORTIE_2 9
Stepper objetStepper(STEPS_PER_REVOLUTION, BROCHE_SORTIE_1, BROCHE_SORTIE_2 );
void setup() {
// Activer le moteur:
pinMode(BROCHE_ACTIF_1,OUTPUT);
pinMode(BROCHE_ACTIF_2,OUTPUT);
digitalWrite(BROCHE_ACTIF_1,HIGH);
digitalWrite(BROCHE_ACTIF_2,HIGH);
}
void loop() {
// Faire un pas dans une direction.
// Changer le 1 pour -1 pour effectuer
// un pas dans l'autre direction.
objetStepper.step(1);
// Attendre 500 millisecondes:
delay(500);
}