Arduino > Encodeur de rotation
Contents (hide)
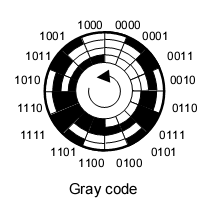
1. Le code Gray
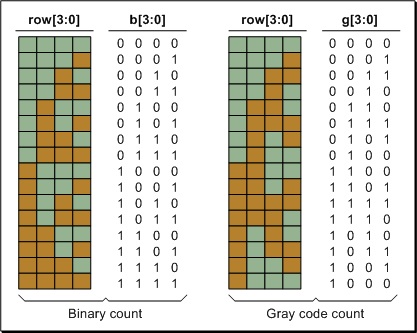
2. Le code Gray relatif
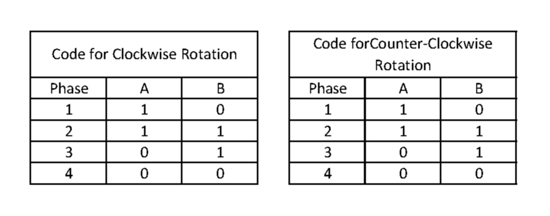
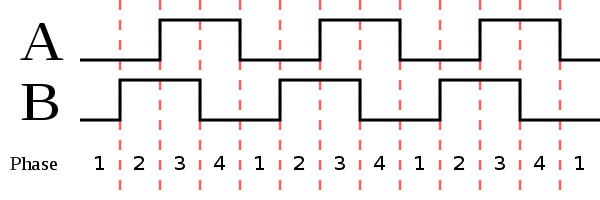
3. Encodeur incrémental générique (2 bit)
Les borne A et B de l'encodeur doivent être reliées aux interrupteurs de l'Arduino. Voir le tableau suivant pour déterminer les bonnes broches : http://arduino.cc/en/Reference/attachInterrupt  . Dans le cas de l'Arduino Leonardo, les broches des interrupteurs 0 et 1 sont 3 et 2.
. Dans le cas de l'Arduino Leonardo, les broches des interrupteurs 0 et 1 sont 3 et 2.

Code (cliquer pour afficher/cacher)
#define encoder0PinA 2
#define encoder0PinB 3
volatile unsigned int encoder0Pos = 0;
void setup() {
pinMode(encoder0PinA, INPUT);
digitalWrite(encoder0PinA, HIGH); //Internal Pull-up
pinMode(encoder0PinB, INPUT);
digitalWrite(encoder0PinB, HIGH); //Internal Pull-up
// encoder pin on interrupt 1 (pin 2)
attachInterrupt(1, doEncoderA, CHANGE);
// encoder pin on interrupt 0 (pin 3)
attachInterrupt(0, doEncoderB, CHANGE);
Serial.begin (57600);
}
void loop(){
Serial.println( encoder0Pos );
delay(50);
}
void doEncoderA(){
// look for a low-to-high on channel A
if (digitalRead(encoder0PinA) == HIGH) {
// check channel B to see which way encoder is turning
if (digitalRead(encoder0PinB) == LOW) {
encoder0Pos = encoder0Pos + 1; // CW
}
else {
encoder0Pos = encoder0Pos - 1; // CCW
}
}
else // must be a high-to-low edge on channel A
{
// check channel B to see which way encoder is turning
if (digitalRead(encoder0PinB) == HIGH) {
encoder0Pos = encoder0Pos + 1; // CW
}
else {
encoder0Pos = encoder0Pos - 1; // CCW
}
}
Serial.println (encoder0Pos, DEC);
// use for debugging - remember to comment out
}
void doEncoderB(){
// look for a low-to-high on channel B
if (digitalRead(encoder0PinB) == HIGH) {
// check channel A to see which way encoder is turning
if (digitalRead(encoder0PinA) == HIGH) {
encoder0Pos = encoder0Pos + 1; // CW
}
else {
encoder0Pos = encoder0Pos - 1; // CCW
}
}
// Look for a high-to-low on channel B
else {
// check channel B to see which way encoder is turning
if (digitalRead(encoder0PinA) == LOW) {
encoder0Pos = encoder0Pos + 1; // CW
}
else {
encoder0Pos = encoder0Pos - 1; // CCW
}
}
}
4. Encoder incrémental RGB avec interrupteur (2 bit, COM-10982)
- 24 pulsations par rotation
- COM-10982 chez Spikenzielabs


4.1 Juste les entrées
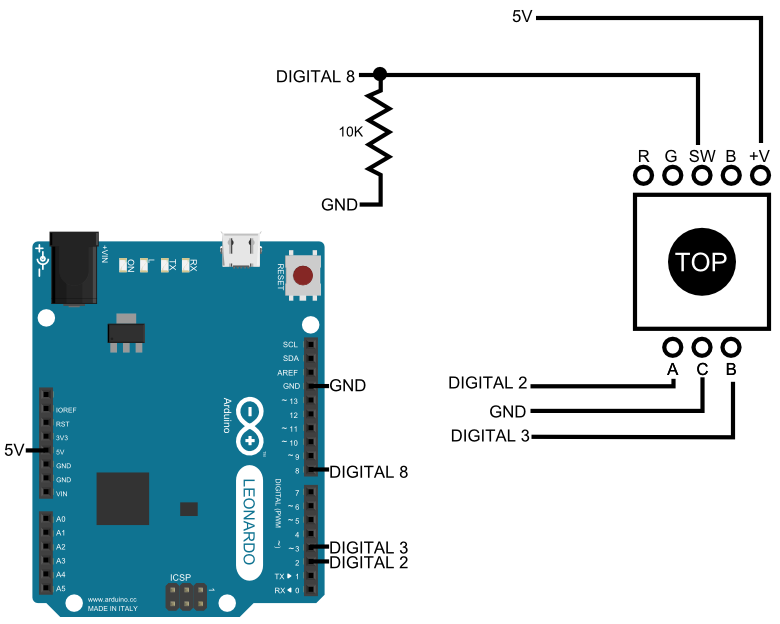
Code pour uniquement les entrées (cliquer pour afficher/cacher)
/*
How to use the inputs of Spikenzielabs Rotary Encoder - Illuminated (RGB) (COM-10982)
http://www.spikenzielabs.com/Catalog/index.php?main_page=product_info&cPath=8_105&products_id=825
Last modified by : Thomas Ouellet Fredericks
Last modification date : 2014/09/30
Based on this article : http://bildr.org/2012/08/rotary-encoder-arduino/
*/
// The following pins can not be changed as they are
// connected to the Leonardo interrupt pins :
// http://arduino.cc/en/Reference/attachInterrupt
#define ENCODER_A 2
#define ENCODER_B 3
#define ENCODER_SW 8
volatile boolean encoderMoved = false;
volatile byte encoderValue = 0;
volatile int relativeValue = 0;
int switchState;
void setup() {
Serial.begin (57600);
pinMode(ENCODER_A, INPUT_PULLUP); // turn interal pullup resistor on.
pinMode(ENCODER_B, INPUT_PULLUP); // turn interal pullup resistor on.
// call updateEncoder() when any high/low changed seen
// on interrupt 0 (pin 2), or interrupt 1 (pin 3) :
attachInterrupt(0, updateEncoder, CHANGE);
attachInterrupt(1, updateEncoder, CHANGE);
pinMode(ENCODER_SW, INPUT);
switchState = digitalRead(ENCODER_SW);
}
void loop(){
int newSwitchState = digitalRead(ENCODER_SW);
if ( switchState != newSwitchState ) {
switchState = newSwitchState;
Serial.print("SW ");
Serial.println(switchState);
}
if ( encoderMoved ) {
encoderMoved = false;
Serial.print("Encoded ");
Serial.println(encoderValue,BIN);
Serial.print("Relative ");
Serial.println(relativeValue);
}
}
void updateEncoder(){
encoderMoved = true;
byte MSB = digitalRead(ENCODER_A); //MSB = most significant bit
byte LSB = digitalRead(ENCODER_B); //LSB = least significant bit
byte newEncodedValue = (MSB << 1) | LSB; //converting the 2 pin value to single number
byte old_vs_new = (encoderValue << 2) | newEncodedValue; //adding it to the previous encoded value
if( old_vs_new == B1101 || old_vs_new == B0100 || old_vs_new == B0010 || old_vs_new == B1011) relativeValue ++;
if( old_vs_new == B1110 || old_vs_new == B0111 || old_vs_new == B0001 || old_vs_new == B1000) relativeValue --;
encoderValue = newEncodedValue; //store this value for next time
}
4.2 Entrées et sorties
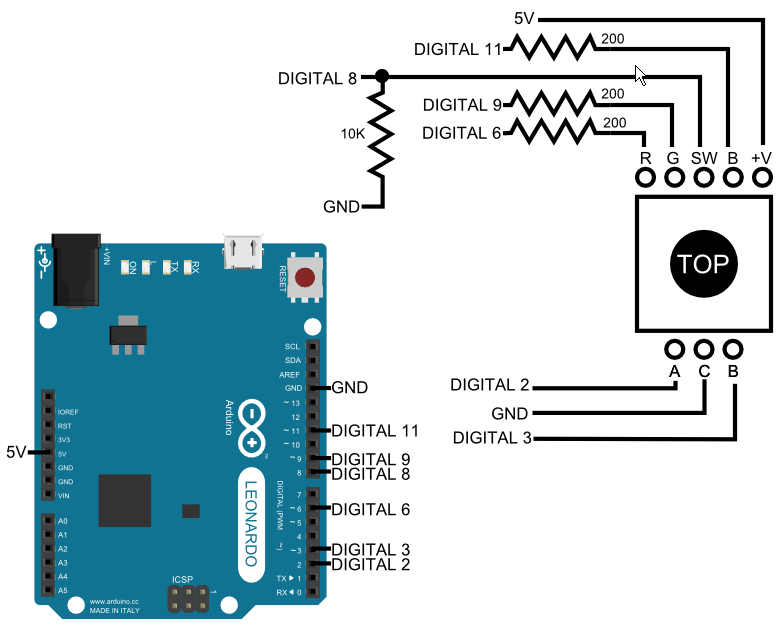
Code pour les entrées et sorties (cliquer pour afficher/cacher)
#define ENCODER_A 2
#define ENCODER_B 3
#define LED_RED 6
#define LED_GREEN 9
#define LED_BLUE 11
#define ENCODER_SW 8
volatile boolean encoderMoved = false;
volatile byte encoderValue = 0;
volatile int relativeValue = 0;
byte r;
byte g;
byte b;
byte h;
byte s;
byte v;
int switchState;
void setup() {
Serial.begin (57600);
pinMode(ENCODER_A, INPUT);
pinMode(ENCODER_B, INPUT);
digitalWrite(ENCODER_A, HIGH); //turn pullup resistor on
digitalWrite(ENCODER_B, HIGH); //turn pullup resistor on
//call updateEncoder() when any high/low changed seen
//on interrupt 0 (pin 2), or interrupt 1 (pin 3)
attachInterrupt(0, updateEncoder, CHANGE);
attachInterrupt(1, updateEncoder, CHANGE);
pinMode(ENCODER_SW, INPUT);
switchState = digitalRead(ENCODER_SW);
h = 255;
s = 255;
v = 255;
}
void loop(){
int newSwitchState = digitalRead(ENCODER_SW);
if ( switchState != newSwitchState ) {
switchState = newSwitchState;
Serial.print("SW: ");
Serial.println(switchState);
}
if ( encoderMoved ) {
encoderMoved = false;
Serial.print("Encoded: ");
Serial.print(encoderValue,BIN);
Serial.print(" Relative: ");
Serial.println(relativeValue);
h = relativeValue % 256;
HSV2RGB();
Serial.print("Hue: ");
Serial.print(h);
Serial.print(" R: ");
Serial.print(r);
Serial.print(" G: ");
Serial.print(g);
Serial.print(" B: ");
Serial.println(b);
analogWrite(LED_RED,255-r);
analogWrite(LED_GREEN,255-g);
analogWrite(LED_BLUE,255-b);
}
}
void updateEncoder(){
encoderMoved = true;
byte MSB = digitalRead(ENCODER_A); //MSB = most significant bit
byte LSB = digitalRead(ENCODER_B); //LSB = least significant bit
byte newEncodedValue = (MSB << 1) | LSB; //converting the 2 pin value to single number
byte old_vs_new = (encoderValue << 2) | newEncodedValue; //adding it to the previous encoded value
if( old_vs_new == B1101 || old_vs_new == B0100 || old_vs_new == B0010 || old_vs_new == B1011) relativeValue ++;
if( old_vs_new == B1110 || old_vs_new == B0111 || old_vs_new == B0001 || old_vs_new == B1000) relativeValue --;
encoderValue = newEncodedValue; //store this value for next time
}
/* HSV to RGB conversion function with only integer
* math : values are between 0 and 255 */
void HSV2RGB() {
byte region;
unsigned int fpart,p, q, t;
if(s == 0) {
/* color is grayscale */
r = g = b = v;
return;
}
/* make hue 0-5 */
region = h / 43; // 4
/* find remainder part, make it from 0-255 */
fpart = (h - (region * 43)) * 6; // 120
/* calculate temp vars, doing integer multiplication */
p = (v * (255 - s)) >> 8; // 0
q = (v * (255 - ((s * fpart) >> 8))) >> 8; // 255 * 120
t = (v * (255 - ((s * (255 - fpart)) >> 8))) >> 8;
/* assign temp vars based on color cone region */
switch(region) {
case 0:
r = v; g = t; b = p; break;
case 1:
r = q; g = v; b = p; break;
case 2:
r = p; g = v; b = t; break;
case 3:
r = p; g = q; b = v; break;
case 4:
r = t; g = p; b = v; break;
default:
r = v; g = p; b = q; break;
}
}
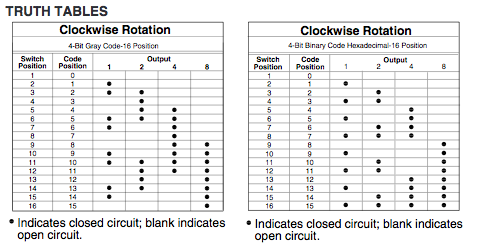
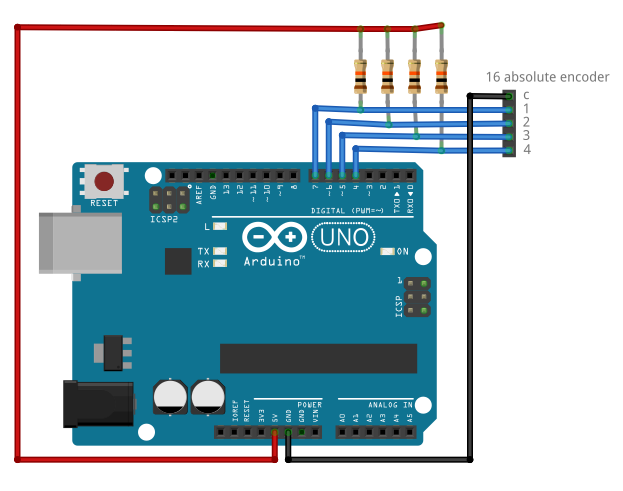
5. Encodeur absolu à 16 positions (4 bit): 25LB22-G
- http://www.digikey.ca/product-detail/en/25LB22-G/GH7299-ND/764241
- http://lgrws01.grayhill.com/web1/images/ProductImages/Series%2025L%20Encoder.pdf
Cet encodeur est composé de 4 interrupteurs. Effectuer la lecture numérique des 4 broches et consulter la table suivante pour déterminer la rotation.
Code (cliquer pour afficher/cacher)
/*
Thomas Ouellet Fredericks
*/
// Connect ENCODER_C to GND
#define ENCODER_1 7
#define ENCODER_2 6
#define ENCODER_4 5
#define ENCODER_8 4
void setup() {
Serial.begin(57600);
pinMode(ENCODER_1, INPUT);
pinMode(ENCODER_2, INPUT);
pinMode(ENCODER_4, INPUT);
pinMode(ENCODER_8, INPUT);
digitalWrite(ENCODER_1, HIGH);
digitalWrite(ENCODER_2, HIGH);
digitalWrite(ENCODER_4, HIGH);
digitalWrite(ENCODER_8, HIGH);
}
void loop() {
byte value = (digitalRead(ENCODER_8) << 3) | (digitalRead(ENCODER_4) << 2) | (digitalRead(ENCODER_2)) << 1 | digitalRead(ENCODER_1);
Serial.print(value, BIN);
Serial.print(' ');
Serial.println(value);
delay(100);
}