Arduino > Moteur à pas unipolaire et ULN2003 ou ULN2803
Contents (hide)

1. Modèles de moteurs pas-à-pas

| Fil noir | ➡ | phase 1 |
| Fil orange | ➡ | phase 2 |
| Fil brun | ➡ | phase 3 |
| Fil jaune | ➡ | phase 4 |
| Fil rouge | ➡ | «common» |

| Fil jaune | ➡ | phase 1 |
| Fil bleu | ➡ | phase 2 |
| Fil rose | ➡ | phase 3 |
| Fil orange | ➡ | phase 4 |
| Fil rouge | ➡ | «common» |
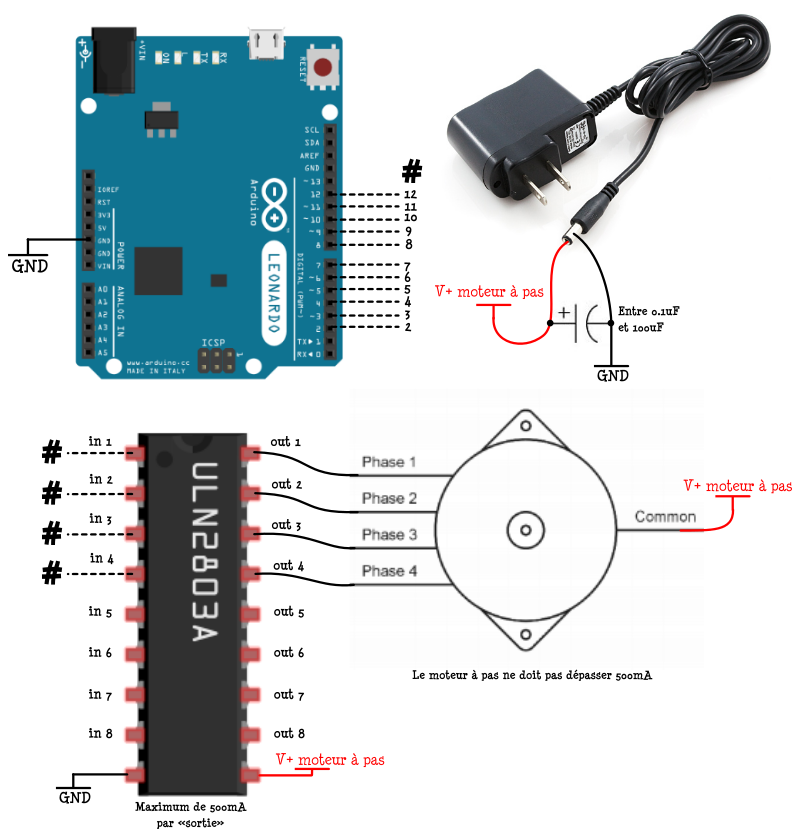
2. Circuit
3. Exemple de code qui contrôle le moteur avec Messenger
#include <Stepper.h>
#include <Chrono.h>
#include <Messenger.h>
// CREER UNE INSTANCE DE Messenger POUR RECEVOIR LES MESSAGES
Messenger messenger = Messenger();
/* LES MESSAGES
* "pasA α" : α EST UN ENTIER ENTRE -32768 ET 32767 QUI DETERMINE LE NOMBRE DE PAS A FAIRE DANS UNE DIRECTION
* "pauseA β" : β EST UN ENTIER PLUS GRAND QUE 3 QUI DETERMINE LE TEMPS DE PAUSE EN MS ENTRE CHAQUE PAS
*/
int pas_par_rotationA = 513; // A TROUVER SUR LA FICHE TECHNIQUE DU MOTEUR
int broche_in_1A = 2; // BROCHE RELIEE PAR LE ULN2803A A LA PHASE 1
int broche_in_2A = 3; // BROCHE RELIEE PAR LE ULN2803A A LA PHASE 2
int broche_in_3A = 4; // BROCHE RELIEE PAR LE ULN2803A A LA PHASE 3
int broche_in_4A = 5; // BROCHE RELIEE PAR LE ULN2803A A LA PHASE 4
Stepper stepperA( pas_par_rotationA , broche_in_1A , broche_in_2A, broche_in_3A, broche_in_4A);
int pasA = 0; // LE NOMBRE DE PAS A EFFECTUER PAR LE STEPPER A
int pauseA = 4; // UN TEMPS D'ATTENTE EN MS ENTRE CHAQUE PAS DU STEPPER A
Chrono pause_chronoA; // UN CHRONOMETRE POUR LA PAUSE DES PAS DU STEPPER A
void setup() {
// La DEL de debogage sera allumee lorsque
// le stepper change de direction,
// donc la mettre en mode sortie :
pinMode(13, OUTPUT);
Serial.begin(57600); // INITIALISER LA COMMUNICATION SERIE
messenger.attach(messageReceived); // LANCER messageReceived LORSQU'UN MESSAGE EST RECU
}
void loop() {
if ( pasA != 0 ) { // SI IL FAUT FAIRE DES PAS
if ( pause_chronoA.hasPassed(pauseA) ) { // EST-CE QUE LE TEMPS DE PAUSE EST PASSE?...
pause_chronoA.restart(); // ... OUI : ALORS REDEMARRER LE CHRONOMETRE
// FAIRE UN PAS DANS LA BONNE DIRECTION
if ( pasA > 0 ) {
stepperA.step(1);
pasA--;
} else {
stepperA.step(-1);
pasA++;
}
}
}
while ( Serial.available( ) > 0 ) {
messenger.process( Serial.read( ) ); // FOURNIR LES DONNEES SERIES RECUES A L'INSTANCE DE Messenger
}
}
void messageReceived() {
if ( messenger.checkString("pasA") ) { // SI LE MESSAGE COMMENCE AVEC "pasA"...
pasA = messenger.readInt(); // ...LIRE LA PROCHAINE DONNEE EN TANT QU'ENTIER (int)
Serial.println("Ok");
} else if ( messenger.checkString("pauseA")) { // SI LE MESSAGE COMMENCE AVEC "pauseA"...
pauseA = messenger.readInt(); // ...LIRE LA PROCHAINE DONNEE EN TANT QU'ENTIER (int)
Serial.println("Ok");
} else {
Serial.println("What?"); // IMPRIMER "What?" SI LE MESSAGE N'EST PAS RECONNU
}
}
4. Exemple de code où le moteur step() et change de direction automatiquement après un intervalle
#include <Stepper.h>
#include <Chrono.h>
#include <Messenger.h>
int steps_per_revolution = 48; // 513 dans le cas du Stepper 5V d'Adafruit
int broche_in_1 = 2; // phase 1
int broche_in_2 = 3; // phase 2
int broche_in_3 = 4; // phase 3
int broche_in_4 = 5; // phase 4
Stepper myStepper(steps_per_revolution, broche_in_1, broche_in_2, broche_in_3, broche_in_4);
Chrono stepDirectionChrono;
int stepDirectionInterval = 4000;
int stepDirection = 1;
Chrono stepWaitChrono;
int stepWait = 4;
Messenger messenger;
void setup() {
// La DEL de debogage sera allumee lorsque
// le stepper change de direction,
// donc la mettre en mode sortie :
pinMode(13, OUTPUT);
Serial.begin(57600);
messenger.attach(messageReceived);
}
void loop() {
if ( stepDirectionChrono.hasPassed(stepDirectionInterval) ) {
stepDirectionChrono.restart();
if ( stepDirection == 1 ) {
stepDirection = -1;
digitalWrite(13, LOW);
} else {
stepDirection = 1;
digitalWrite(13, HIGH);
}
}
if ( stepWaitChrono.hasPassed(stepWait) ) {
stepWaitChrono.restart();
// Step one step:
myStepper.step(stepDirection);
}
// Feed the serial data to Messenger
while ( Serial.available( ) )
messenger.process( Serial.read( ) );
}
void messageReceived() {
if ( messenger.checkString("wait") ) {
stepWait = messenger.readInt();
} else if ( messenger.checkString("interval")) {
stepDirectionInterval = messenger.readInt();
stepDirectionInterval = max(250,stepDirectionInterval);
}
}