Arduino > Exemple de balayage de servomoteur
Contents (hide)
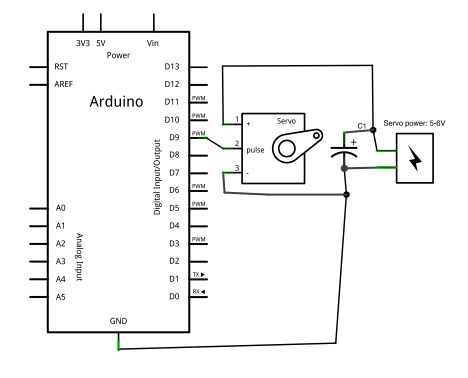
1. Circuit
Le branchement suivant requiert une alimentation stabilisée.

2. Code du contrôleur
#include <Servo.h>
//Creer une instance de la logitheque
Servo myservo;
int angle = 1000;
void setup()
{
//Activer la fonction servo de la broche 9
myservo.attach(9);
}
void loop() {
// Tourner le servomoteur selon l'angle
// qui incremente
myservo.writeMicroseconds(angle);
delay(10);
angle = angle+1;
if ( angle > 2000 ) angle = 1000;
}