FourTen > ExempleInterrupteurEtDEL
Contents (hide)
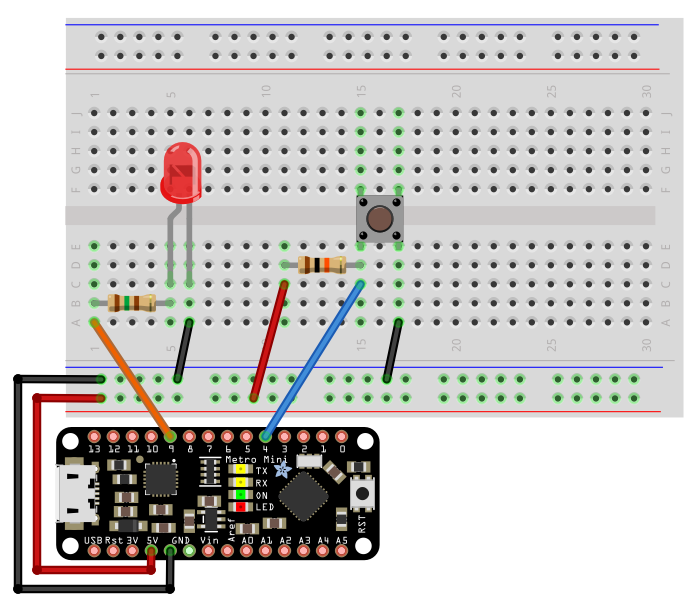
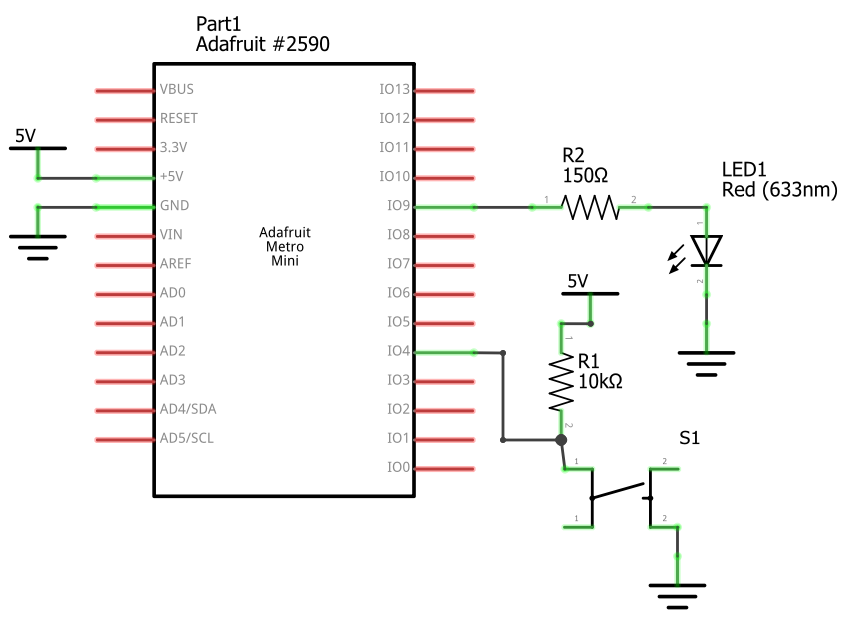
1. Circuit
2. Code Arduino/Wiring
/*
Description
=============
Exemple de l'utilisation du protocole FourTen, pour
recuperer l'etat d'un interrupteur et controler une
DEL a partir de l'ordinateur.
Circuit
=============
* une DEL a la broche numerique 3;
* un interrupteur a la broche numerique 7.
FourTen
=============
Vers carte:
Canal Fonction
1 Allume ou eteint la DEL
Vers ordinateur:
Canal Fonction
1 Indique l'etat de l'interrupteur
*/
int previousButtonState;
void setup() {
Serial.begin(57600); // Initialiser la communication serie.
pinMode(7,INPUT); // Configurer interrupteur.
pinMode(3,OUTPUT); // Configurer DEL.
}
void loop() {
// Est-ce qu'il y a un message FourTen de disponible?
if ( fourTenAvailable() ) {
int channel = fourTenReadChannel(); // Lire le canal.
int data = fourTenReadData(); // Lire la donnee.
// Si le canal == 1, appliquer la donnee a l'etat de la DEL.
if ( channel == 1 ) digitalWrite(3,data);
}
int currentButtonState = digitalRead(7); // Lire l'etat de l'interrupteur.
// Verifier si l'etat de l'interrupteur change
if ( previousButtonState != currentButtonState ) {
// Envoyer un message FourTen sur le canal 1 avec comme
// donnee l'etat de l'interrupteur.
fourTenWrite(1,currentButtonState);
// Emmagasiner la valeur de l'interrupteur.
previousButtonState = currentButtonState;
}
}
//fourTenStart
/*
______ _______
| ____| |__ __|
| |__ ___ _ _ _ __| | ___ _ __
| __/ _ \| | | | '__| |/ _ \ '_ \
| | | (_) | |_| | | | | __/ | | |
|_| \___/ \__,_|_| |_|\___|_| |_|
par Thomas Ouellet Fredericks
tof@t-o-f.info
Creative Commons Attribution-ShareAlike 3.0 Unported
Description
=============
FourTen est un protocole de communication tres simple et tres rapide.
Il permet d'envoyer des données dont la valeur se situe entre 0 et 1023 (10 bits)
sur 16 canaux numerotes de 0 a 15 (4 bits).
Installation
=============
Pour utiliser le protocole dans Arduino ou Wiring,
copier tout ce qui se trouve entre //fourTenStart et //fourTenEnd
et l'ajouter a la fin de votre sketch.
Utilisation
=============
# fourTenWrite(int canal, int donnee)
Permet d'envoyer un message fourTen.
# fourTenAvailable()
Retourne 1 si un message FourTen est disponible.
Retourne 0 sinon.
# int fourTenReadChannel()
Retourne le canal d'un message FourTen recu.
# int fourTenReadData()
Retourne la donnee d'un message FourTen recu.
Details du protocol FourTen
=============
Chaque message est construit a partir de deux octets:
| octet 1 octet 2 |
| bit 7 6 5 4 3 2 1 0 - 7 6 5 4 3 2 1 0 |
| fonction 1 C C C C D D D 0 D D D D D D D |
C: canal
D: donnee
octet 1:
bit 7 = 1
bits 6-3 = canal
bits 2-0 = bits 9-7 de la donnee
octet 2:
bit 7 = 0
bits 6-0 = bits 6-0 de la donnee
Le bit 7 de chaque octet sert a identifier si c'est
l'octet 1 ou 2. En excluant ces deux bits,
il reste donc 14 bits qui se subdivisent ainsi:
4 bits (canal) suivis de 10 bits (donnee)
Le canal peut avoir une valeur entre 0-15.
La donnee peut avoir une valeur entre 0-1023.
*/
void fourTenWrite(int channel, int data) {
Serial.write( ( channel << 3 | ( ( data >> 7) & 0x07 ) ) | 0x80);
Serial.write( data & 0x7F);
}
int fourTenBuffer;
int fourTenAvailable( ) {
while ( Serial.available() ) {
int data = Serial.read();
if ( data & 0x80 ) {
fourTenBuffer = data & 0x7F;
}
else {
fourTenBuffer = ( fourTenBuffer << 7 ) | ( data & 0x7F );
return 1;
}
}
return 0;
}
int fourTenReadChannel() {
return fourTenBuffer>>10;
}
int fourTenReadData() {
return fourTenBuffer & 0x3FF;
}
//fourTenEnd
3. Code Processing
import processing.serial.*;
/*
*
* ___ __ __ ___ ___ ___ _____ _ _ _ _____
* |_ _| \/ | _ \/ _ \| _ \_ _/_\ | \| |_ _|
* | || |\/| | _/ (_) | / | |/ _ \| .` | | |
* |___|_| |_|_| \___/|_|_\ |_/_/ \_\_|\_| |_|
*
* Lorsque vous demarrez ce code, les noms de tous les ports series
* sont affichés dans les messages de debogage de la fenetre Processing.
* Vous devez changer la valeur de la variable "portName"
* pour qu'elle corresponde au nom du port serie de l'Arduino.
*/
// Choisir le port serie.
String portName = "/dev/tty.usbserial-dfrobot";
// Declarer une instance de la classe Serial:
Serial serial;
// Declarer une instance de FourTen:
FourTen fourTen;
// Declarer une variable qui correspondra
// a l'etat de l'interrupteur.
int interrupteur;
void setup() {
size(256, 256);
smooth();
println(Serial.list()); // Affiche les noms des ports.
// Creer une instance de la classe Serial avec
// un baud de 57600 et le port choisi.
serial = new Serial(this, portName, 57600);
// Creer une instance de la classe FourTen
// et la lier à l'instance serial.
fourTen = new FourTen(serial);
}
void draw() {
while ( fourTen.available() ) {
int channel = fourTen.readChannel(); // Lire le canal.
int data = fourTen.readData(); // Lire la donnee.
// Si le canal == 1, appliquer la donnee a l'etat de la DEL.
if ( channel == 1 ) interrupteur = data;
}
if ( interrupteur == 0 ) {
background(0);
}
else {
background(255);
}
}
void mousePressed() {
fourTen.write(1, 1);
}
void mouseReleased() {
fourTen.write(1, 0);
}
//fourTenProcessingStart
/*
* ______ _______ _____ _
* | ____| |__ __| | __ \ (_)
* | |__ ___ _ _ _ __| | ___ _ __ | |__) | __ ___ ___ ___ ___ ___ _ _ __ __ _
* | __/ _ \| | | | '__| |/ _ \ '_ \ | ___/ '__/ _ \ / __/ _ \/ __/ __| | '_ \ / _` |
* | | | (_) | |_| | | | | __/ | | | | | | | | (_) | (_| __/\__ \__ \ | | | | (_| |
* |_| \___/ \__,_|_| |_|\___|_| |_| |_| |_| \___/ \___\___||___/___/_|_| |_|\__, |
* __/ |
*
par Thomas Ouellet Fredericks
tof@t-o-f.info
Creative Commons Attribution-ShareAlike 3.0 Unported
Description
=============
FourTen est un protocole de communication tres simple et tres rapide.
Il permet d'envoyer des données dont la valeur se situe entre 0 et 1023 (10 bits)
sur 16 canaux numerotes de 0 a 15 (4 bits).
Installation
=============
Pour utiliser le protocole dans Processing,
copier tout ce qui se trouve entre //fourTenProcessingStart et //fourTenProcessingEnd
et l'ajouter a la fin de votre sketch.
Utilisation
=============
# FourTen( Serial serial )
Creer une instance de la classe et la lier au gestionnaire de la communication
serie de Processing.
# <FourTen>.write(int canal, int donnee)
Permet d'envoyer un message fourTen.
# boolean <FourTen>.available()
Retourne true si un message FourTen est disponible.
Retourne false sinon.
# int <FourTen>.readChannel()
Retourne le canal d'un message FourTen reçu.
# int <FourTen>.readData()
Retourne la donnee d'un message FourTen reçu.
Details du protocol FourTen
=============
Chaque message est construit a partir de deux octets:
| octet 1 octet 2 |
| bit 7 6 5 4 3 2 1 0 - 7 6 5 4 3 2 1 0 |
| fonction 1 C C C C D D D 0 D D D D D D D |
C: canal
D: donnee
octet 1:
bit 7 = 1
bits 6-3 = canal
bits 2-0 = bits 9-7 de la donnee
octet 2:
bit 7 = 0
bits 6-0 = bits 6-0 de la donnee
Le bit 7 de chaque octet sert a identifier si c'est
l'octet 1 ou 2. En excluant ces deux bits,
il reste donc 14 bits qui se subdivisent ainsi:
4 bits (canal) suivis de 10 bits (donnee)
Le canal peut avoir une valeur entre 0-15.
La donnee peut avoir une valeur entre 0-1023.
*/
class FourTen {
Serial serial;
int fourTenBuffer;
FourTen( Serial serial) {
this.serial = serial;
}
void write(int channel, int data) {
serial.write( ( channel << 3 | ( ( data >> 7) & 0x07 ) ) | 0x80);
serial.write( data & 0x7F);
}
boolean available() {
while ( serial.available () > 0 ) {
int data = serial.read();
if ( (data & 0x80) == 0x80 ) {
fourTenBuffer = data & 0x7F;
}
else {
fourTenBuffer = ( fourTenBuffer << 7 ) | ( data & 0x7F );
return true;
}
}
return false;
}
int readChannel() {
return fourTenBuffer>>10;
}
int readData() {
return fourTenBuffer & 0x3FF;
}
}
//fourTenProcessingEnd
4. Code Max
----------begin_max5_patcher---------- 2914.3oc6cssaiaiF9ZmmBBgtEyflDHRczKBB1Y21KJPawfs6cyTDHKw3nVY IsRzooa29.0tOB8tYdwVRQJYIacf1wVlZPtH1w53O+zO+Oye8qWLSaQxS3bM veE7NvrY+5EylUrI1FlI98LsUdO4G4kWbXZ9IqVgiIZWx2GA+DoX6ecLAmks NkfWmUty6ShI4g+GL6.fnq0EaNd8pv3HLo3BBKO1rkKX+Vu5vR8H9ODFu7tL rOgShVlrcCLrbt15R.zp3WH5mfePbRgAETSxhe7JnUc5H1aUAcn8lrPuHsMj RxZRIsny13ucwErOt7YhGe4W8MmNX.VLvcrXeNDJXNFn.IY4xHb40iewH+RJ lSuZgT.ph3Zcb2xnzjOvrgrm0lEiU1msNHQsOT1b0ynCbJC5c3XuEQXkZX5x 4o2LB6YbBGmwYL9mo2tc3oyn2RL.143W6R5eUzsLr8ngwEHGQb6iI2Ye4wQG .nrBmm6sDuCp.AeVOPxQCN3yFfHA2RwObaGNP68bd3wiIIEbex5r+EN9JRxU dYAqCiSNRvyvBKf17ufy6icY9dCO0uw3LAnHPE5kILB+HNKOLIt1QOSyKMs1 lmU6TXP4OlTbgrurZSTjpXS5UaJC+XX446v2H8AzEk6rbzOWWvOXTLWwfO5M L1L7oOLWFk3+S3f52.sjTbbXbZFNmpCyiHtSU6N.eu25Hxcs+vo49u2yG24I 2JHOSaYVXPRLiHZblrMWd6nZ6XCFq5Ckh8G6k1xolSGEqyW3kwvMgDPT4NII IQM2U0iJJqtWb3JOBlDxIUjd0EMbUZVgr8Z2Ht.1Gx8yRhhZbo364wV1S.8o oO9mCCHOzPGOaOzCOLs7AfVEBEDtDmSZtMh2x7laogUb0YypOGtw16atby4y 3mRy.u5UeVHB7W.Pcj4qA2dKv40fu.7J.cyP1lseM3la.FuF7eo7Gt0uNcOk umo8cJYrqo+PC97d9WHGmsm9uiHRj1VTQ6rncHpbVo3RwLxiOrS.Qfn9AxKO TvD1OX5nuwRDCDy5q9PRnyghjnwAI4LvL92OmhJNud74NsK7VgyaN2dHVSns JvZxurZOKVHpHzhurJ+ryYicOlpi4k9ZwNs2SklCxwL.48ZZGwAdwXbO3QZ. K5x.KVxAJvddP2Anbi+Cdww3naA2D3Q7tsMbYiZznv3tzZTP6r82NfkSsvyu DNJEmBZNRnpzHgwU1T7tpmzacbODFDzTINWuWNSKZPkGLC9zceIYlbK.TFRV wnYYfYlLDUglsmdrFxhxNGIRF7CWT2zdsbuGwA2QuETIG24QHYgKnddmuseG OWyuG1798vpzVIhdt4ccSotorvKR3oU041hwuWrADORdtxLxGbeVxp2zzs0m ouoFbM+huf5F84aJZLBW2ftty.gwy4ciRy1EFw2K.A+jy6cGWdfbKPNf67he 4p+h26u389XXqtw7qQT+SrrkztTq82XcYrK8D34WXulwWOZ8GSu8D3oH90P8 4W6LfKzlJerHV.5GKW3EujEOhCFSkiG0zPxfRXnBwjXXOI2At1GmI4Q71U+j 4M460XlAbRbxtGlsatA3bVl25.KlnZXKxw7fgPzRwm1d6s.iyiDvFF7JARZn 3H4metXIMKD6UBjCJ1S4ip8WbV0HqKKLBUdExgfgMt4DpOtjwTZDUWwSRPQp ANmywEN+ZhFL8.tJNyYpm+OMH+4obdtEuFI1sjQNdotZrDWBfmEdRXY8DH4z anpaJzROBFfF.MO7DpJGeIhyWZYNHeo4DPZo6YkyzRRokNunIWFuHgHIcrFc L4LOIohT5TjYoL4axbry2zymjMjjjMUJJFJKHCUBRFYIapSgpCMuObFJBIKc wKnNhLPxliZC0gj0ksfKTLZVeZUjHHIgYGkhhkR+m5Hyf4EtbLF5SupGRcDy As1GVCEglM2Gs1JDMKk0QtStpzB8RQZMEKRqEkkqi.tezayMZqc0SkIgWsf+ DEt2KnHd16KV8gH95N013Zq1JII6oYcGYqyWmPt7.kVMFaT1Q9IQ7K+6.vBD o5C8Cr9jfuTeRur5hpuLWFNprmrxJwhO81Uxne4p3wkkUnN5m0B0wRr.lMqs LU6sPcbTdHEBVhIoIYD.Rl.0dJQWHr9R92YvBqv3fyKiw3sJ2NeS+MmKJ3XY qpLknrxZtNzahm4XxlUi9Hl40RjjWColFau5z2AIU8BUg2pCXy5OOoLrDP4c 5C6AyyExVwkiddy.KxpXYWZVz2XFNArGdo8MVSz8iRxwms44hu38Yf9lmilB k1740hInsQs9+xvVLgPpNuomOI7Q74TODqFdYSzGj+TMVq0LjawZBg5dV8gW VBIgAXUjD0yznn6VjjEfyntZOnjz13Z4mcRbM+50EdyK9.tEbsXYxi6bFF5H S37Ka8+19BzyyV50dOnj5QRngUwEB2Equ91m.wG166ftww6VMP28+19zO.qP MlKh3jd6CfdhDSe3z1D.GH1dqs0io1eeFpsGp8SwA7vA4dcyExPKsnpsjhHB SQTRRZOJ+dYBnpLAzZyzOnt0Ta9WYw0qFS+LU9YeY36oCvGFokCTThW.2Drg rQ6jXblkUslPms9PFmYpDEBaydRYS77av.gsafO7+JB77G9Sf282GxRQAHBC hSVABv4E99lCx+3umEhAAdw4fHOv833O9GjLL3a8d555WeVd67obcjsYE6S1 y5ETVv7vfcXC46Y6mOc9famllYmONc3gmPuV0Maa2i4gG7xVPejr0lm5fQ2N agaf5lLyr2sYDpjUgautrjR0xG.dEio+LzfnPksxU9R+evvm8IPGhxvz85Mq UiSRKhZpzUnPyKLi3pSWegRajTt7Ov.+j.LHEmQsxfpFAj8we2ecJUIRgxkb l1k7ZpW3GTZR55Ht1G5kdMHMZcNXgWd2ZXLelp5kVigCrRmOa9oaoY.cZ.fo xqwfkIqyQrYDIaUXnMe0Y0aNBrmHZMNGfoXsDAcKz8Z6LHXNEBDaD8O+HrWl TAjk8W4+yOqSgG.hLGHx7p87AS45AG9DyiHPulIGs9spd0SsyNSYUu1pjfcr 3tubbKMZ2WPCDAKniDYSvqD0chVokY.sKYerNeAusTbUv8YIKRHU64e9clnq rcMMt56e6aq15eOZMljjPd3pukNLW07ngFeErii9se4at56+kXesCN5BB9Gj HoSv1cgruPFTm4R+XDcfN6R7iPG4gfyNABKgxIrjadMZ3lC77WxNsLL07xlR hjSqD0Mk7QEghqe3OqYDq+CIg4gE1mVX8DOnHWqsOg433GLixZrRzCFDRVL6 wwg4GSaSOIKdSYWUEFpS+M0U1JmWcHYmIWGYU1dHqg5rZaLsldKcLYW4JJz5 PVZdYS0hlmXhLLldcwYCqo2x5sflQSPZFNsXMLmd5SLjcg0afTKZdpIoCMA4 MfRJ1vVsHYofYK0hlMlfrFRIcdt5Pyx1oHTmEibKnWGrFpicnHo81VcVn5Ho 8DTgZhHRaHpqZQyRI1PcTofLmb9nHcqGxQsHY3mnuChfJTK4PZCjbldsjCqi Ti7opmbb7dI3vyqH3usvac.vxwVWu222yWd7eO3.myW2JvdemGaMFuyi6.i9 2qvjrjddSP2nfbetu5iqdwIUjzIqdQkQ4Me7o30.tXP5Xtobi5ZLZbVeIfyJ HaVtx.vQ6ECEeow4f580B0y4AewErYdr3Hz1B.E3ztB9ZnGWpPPuqDuck1sy SLYoGGIHmlJXNojCbtDziynQNxPMViF0XqTTSCMyxDEoVnlUgAoITofhISlF t7lnDprnw063WFt67CWaQOy1h++aHsi5PdvIKyGsm.lJE+fgDTy3IWCIC3LW sjqgFOxQBpw3.oFtJxs5MYLBYqdR1V8irs6EYzq1ucw+Gq06t3B -----------end_max5_patcher-----------