Arduino > Communication série en ASCII
Contents (hide)
1. Code Arduino/Wiring
Pour envoyer un message ASCII d'une carte Arduino, il faut d'abord initialiser une communication série à une vitesse(baud) que nous déterminons avec la commande Serial.begin(). Il faut ensuite utiliser les diverses formes des commandes Serial.print()  et Serial.println() .
et Serial.println() .
1.1 Déboguer
Pour déboguer la communication série, on peut ouvrir le «serial monitor» du logiciel Arduino:
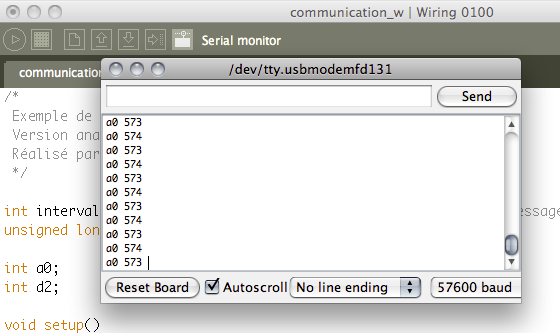
1.2 Envoyer une entrée numérique
Pour envoyer la valeur mesurée à l'entrée numérique 2 nous utilisons le code suivant:
Afficher/cacher le code
/*
Exemple de base de communication ASCII.
Version numérique.
Réalisé par Thomas O Fredericks.
*/
int interval = 20; // Intervalle de temps entre deux envois de message.
int val;
void setup()
{
// Initialiser la communication série à 57600 baud.
Serial.begin(57600);
}
void loop()
{
// Exécuter le code suivant seulement si l'intervalle de temps
// s'est écoulé:
delay(interval);
int newval = digitalRead(2); // Lecture de la broche numérique 2.
// Envoyer la valeur seulement si elle est différente:
if ( newval != val ) {
val = newval;
// Construction du message:
Serial.print("d2"); // Envoi de la chaîne de caractères "d2" pour identifier la valeur.
Serial.print(' '); // Envoi du caractère «espace» pour séparer l'indentifiant de la valeur.
Serial.print(val, DEC); // Envoi de la valeur.
Serial.println(); // Envoi de l'indicateur de terminaison du message (retour à la ligne et retour de chariot)
}
}
1.3 Envoyer une entrée analogique
Pour envoyer la valeur mesurée à l'entrée analogique 0 nous utilisons le code suivant:
Afficher/cacher le code
/*
Exemple de base de communication ASCII.
Version analogique.
Réalisé par Thomas O Fredericks.
*/
int interval = 20; // Intervalle de temps entre deux envois de message.
int val;
void setup()
{
// Initialiser la communication série à 57600 baud.
Serial.begin(57600);
}
void loop()
{
// Exécuter le code suivant seulement si l'intervalle de temps
// s'est écoulé.
delay(interval);
int newval = analogRead(0); // Lecture de la broche analogique 0.
// Envoyer la valeur seulement si elle est différente:
if ( newval != val ) {
val = newval;
// Construction du message:
Serial.print("a0"); // Envoi de la chaîne de caractères "a0" pour identifier la valeur.
Serial.print(' '); // Envoi du caractère «espace» pour séparer l'indentifiant de la valeur.
Serial.print(val, DEC); // Envoi de la valeur.
Serial.println(); // Envoi de l'indicateur de terminaison du message (retour à la ligne et retour de chariot)
}
}
1.4 Envoyer une entrée numérique et une entrée analogique sans delay()
Pour envoyer la valeur mesurée à l'entrée analogique 0 et à l'entrée numérique 2 nous utilisons le code suivant:
Afficher/cacher le code
/*
Exemple de base de communication ASCII.
Version analogique et numérique.
Réalisé par Thomas O Fredericks.
*/
int interval = 25; // Intervalle de temps entre deux envois de message.
unsigned long timeStamp;
int a0;
int d2;
void setup()
{
// Initialiser la communication série à 57600 baud.
Serial.begin(57600);
}
void loop()
{
// Exécuter le code suivant seulement si l'intervalle de temps
// s'est écoulé:
if ( millis() - timeStamp >= interval ) {
// Mettre en mémoire le temps présent pour calculer le
// prochain intervalle:
timeStamp = millis();
int newval = analogRead(0); // Lecture de la broche analogique 0.
// Envoyer la valeur seulement si elle est différente:
if ( newval != a0 ) {
a0 = newval;
// Construction du message:
// Envoi de la chaîne de caractères "a0" pour identifier la valeur:
Serial.print("a0");
// Envoi du caractère «espace» pour séparer l'indentifiant de la valeur:
Serial.print(' ');
// Envoi de la valeur:
Serial.print(a0, DEC);
// Envoi de l'indicateur de terminaison du message
// (retour à la ligne et retour de chariot):
Serial.println();
}
newval = digitalRead(2); // Lecture de la broche numérique 2.
// Envoyer la valeur seulement si elle est différente:
if ( newval != d2 ) {
d2 = newval;
// Construction du message:
// Envoi de la chaîne de caractères "d2" pour identifier la valeur:
Serial.print("d2");
// Envoi du caractère «espace» pour séparer l'indentifiant de la valeur:
Serial.print(' ');
// Envoi de la valeur:
Serial.print(d2, DEC);
// Envoi de l'indicateur de terminaison du message
// (retour à la ligne et retour de chariot):
Serial.println();
}
}
}
2. Processing
Pour recevoir les messages dans Processing, on utilise la logithèque Serial.
Afficher/cacher le code
import processing.serial.*;
// Lorsque vous démarrez ce code, tout les ports
// séries sont affiché dans la fenêtre de déboguage.
// Changer la chaîne suivante pour qu'elle
// corresponde au nom de votre port série.
String portName = "/dev/tty.usbmodemfd131";
// Déclarer une instance de la classe Serial:
Serial serial;
int a0;
int d2;
void setup() {
size(256, 256);
smooth();
println(Serial.list()); // Affiche les noms des ports.
// Créer une instance de la classe Serial avec
// une vitesse de 57600 baud:
serial = new Serial(this, portName, 57600);
// Indiquer à l'instance serial de lancer la fonction serialEvent
// lorsque l'octet 10 est reçu. L'octet 10 est envoyé par
// Serial.println() pour terminer le message:
serial.bufferUntil(10);
textAlign(LEFT,TOP);
}
// Définir une fonction pour recevoir les données du port série:
void serialEvent(Serial p) {
// Lire le message.
String chaine = p.readString();
// Séparer les éléments du message
// selon les espaces:
String[] elements = splitTokens(chaine);
// S'assurer qu'il y a bien deux mots
// dans le message et ensuite attribuer
// la valeur à la bonne variable selon
// l'identifiant:
if ( elements.length == 2 ) {
if ( elements[0].equals("a0") ) {
a0 = int(elements[1]);
}
else if ( elements[0].equals("d2") ) {
d2= int(elements[1]);
}
}
}
void draw() {
background(0);
text("a0: "+ a0, 20, 10);
rect(0,30,a0/1024.*width,20);
text("d2: "+ d2, 20, 50);
if ( d2 > 0 ) rect(0,70,width,20);
}
3. Max/MSP
Pour recevoir un message ASCII par communication série dans Max/MSP, on utilise la classe serial:

<pre><code> ----------begin_max5_patcher---------- 1681.3oc6Z0saaaCE95jmBBeia.xDD+QRT6pk0ALTfNrK5kqEExRzNrUhzkR JKoE8cY2skcwdI7K1NjxxVNwVwNSocFnH.9GZJxy4imy246HkOc5IilnuVTN B88neCcxIe5zSNwMjcfSV98SFUjbcZdRoaZiR0EEBU0nya9sJw0UtweYBJ8x jE+iRfDJTgnrLYl.8KIW60N0olYSrS02ye4HySpRuTpl8ViHspwHh4d9QLZL 6bDih83bFIJ5bDgG.WEh.WK5MKuZYlai0Sd22ErZOzpJURgv8KWXjI4s+hpt PpxEUNu.udPccU6n9cVjR4GcKBl34aG8ymdp8ky+OhROWqtRXpjFTtnDozES Lv6.f0hcW7pm+hW73gL+HO+XeNG+fPF4XAx9Yitdt3d.VtrrRfd1GyQyrS3L jnxMEg5J8M1oqMkenV.iAXqb5Ti.goHQILqZzyJE4.9gv9vfmsBtykJQptV4 1Xxi7LfxB8hB8o3fUmAT51OCnwGKGBuT73SoiXdQAD+PH7LJzymR8ImivA98 EcR+eWF8R2+dHCAi7Gsammfcdb.uw64AwrXfOqw6w7c383Cz6Ia06w6v6WNb yLqtYtnwTGMB8lGAvnD+NXy2CWlZzEk2TLQm2C5..PP.MhP1jsOh1Ky0vj07 UEcjU5j9vkHuHB72cnzAlk9vE9AhKzAAWjV5xADZ5RMuGPDYSF2n9K5EMHPD 8.gnIIpYiNe86CJd0VAbOwJN0KNvm4GCjP8mlENHjPjCMM6QiO8T6ZtQTHAQ AIlY014fx.gAffU60JPiKEVmZLJawsUBC3RNYCy0lJT4haMRAZwefz0WY.ca I01oUjXLP0.OzqUvxmIpuVt3uJbyCVijI4VEdInqjUB6N7rII0YmY20TsRIt VpU1K8GxpLHLJIsRdkaKseOUf9PszoTQs31TaYGowZM01eyTk.lWIJMw.KM5 BSVsTo2tBlvCoJMNf6QvLtkygvfHCV.i4jQ5Hc3Q6HJ4nQ58upbZCgCyZEZr MUbbCnNUaREtiqR3DWZONKQYv4zhagOXDK9yZ384IlUAJCffQNwKjFRsU9hi 7B.vN.DHQC86SuHgdDpWbrMOBfZHwR3R7RuTKKcc.0ME6vzThIDOdbXHmZIv 3dQwTZHP+SCH8wogiOVjU5Pl9jH.j21.n.K.fwN98PqbAbeBKw7iHgk6J15m ZnecsDhJ.5Vi9vBdfXj3XbDyJWfrJ26A5HAGdrj6gOC87bIz6qAUBzaima.I ZK45VWgygdSzpMxAeshbF5UKt0p.CpQIbUibSPzvddSBT7zg6alcC08xGCvD jguhjDJvQOCs9zRnJqg5g1qdLPEXz6fGkdHmkLlms8pHn+pXu.PYCM1Jxg3A 4FgrHaWW637jcTxkt7rbIY53joSkoW1bXpzEtRW1SjxVgKYIpRaosoB0h+tB zQLF5eeHJfgwta4AqoY9X.uihBirhwo8UBC6ezv.ag5Q6EKBNLviux+6i.le 72XeS5MJAE.8b4iZzvteMePXwN5VqtRLo2N0FF1VxinW1gt+rO3355GhBWAQ cDCBBx6AfXeUhjbcv9nPmJ8rY4h8CD5TUlz+sIr2XAPxNfKP8t2JTPKYhtDG aGFFtatg83eRcUkV0ZhWJaXYG0CFPCWc2B2aL.2SGXneTmm09ySzlLg4Nfv8 QMCTNHS3V+vtU.1MVZ80Tct1z3D9dTVrsrv8+.tiKrJAo6g3VtIKSl0Yscpa 88h3bBMv9IVDfV7MW4IIouelyM1YHN0qqwquRX1vAb1b6KcWZ4LkFNtxkouu 6Z2.sarDN6r8ktKw1uiGm+EOVqyirnaGTOPvF8HOXi7sfsuxAacEK0evV7wd vF9aAaaOXycItlOty+6AtPG63aFAVB8tl1tpK0QiVuwPWOURUhsk0NyIbi4b oLKSn5d3VHylqASaoIDR7Xs544bPaebL2xGF4QVJKY8vq2YYoMlwcbr8lO1W OJbO7H6iunWWZ3LG1..vCm0P2Cqg8EyZrO.xGzbrOCWDd+C+H.CY6iBEXmrp .CAsegXuf1me7pgeBB+H6SF0cb7mTLNZC3aG1yAlhGDrJWlFw7hIAgj3MRwW O7SAFa8Ix.6Sb5FFOix8w22mZF9ovm1KdK9Wr3F7SQkApGt8Vsy783XNlEtA Dud3GDhaJ8kLeNTYtboY47FPl06ZJx5dtcfQnZ9pqT7Hi3JY67cBHFkX.UVU fDqZSivnq4giN0tOe9z+EDCSbYC -----------end_max5_patcher----------- </code></pre>
4. Pure Data
Pour recevoir un message ASCII par communication série dans Pure Data, on utilise plusieurs classes qui sont distribuées avec Pd-Extended:

5. Isadora




